工具库
1. 介绍
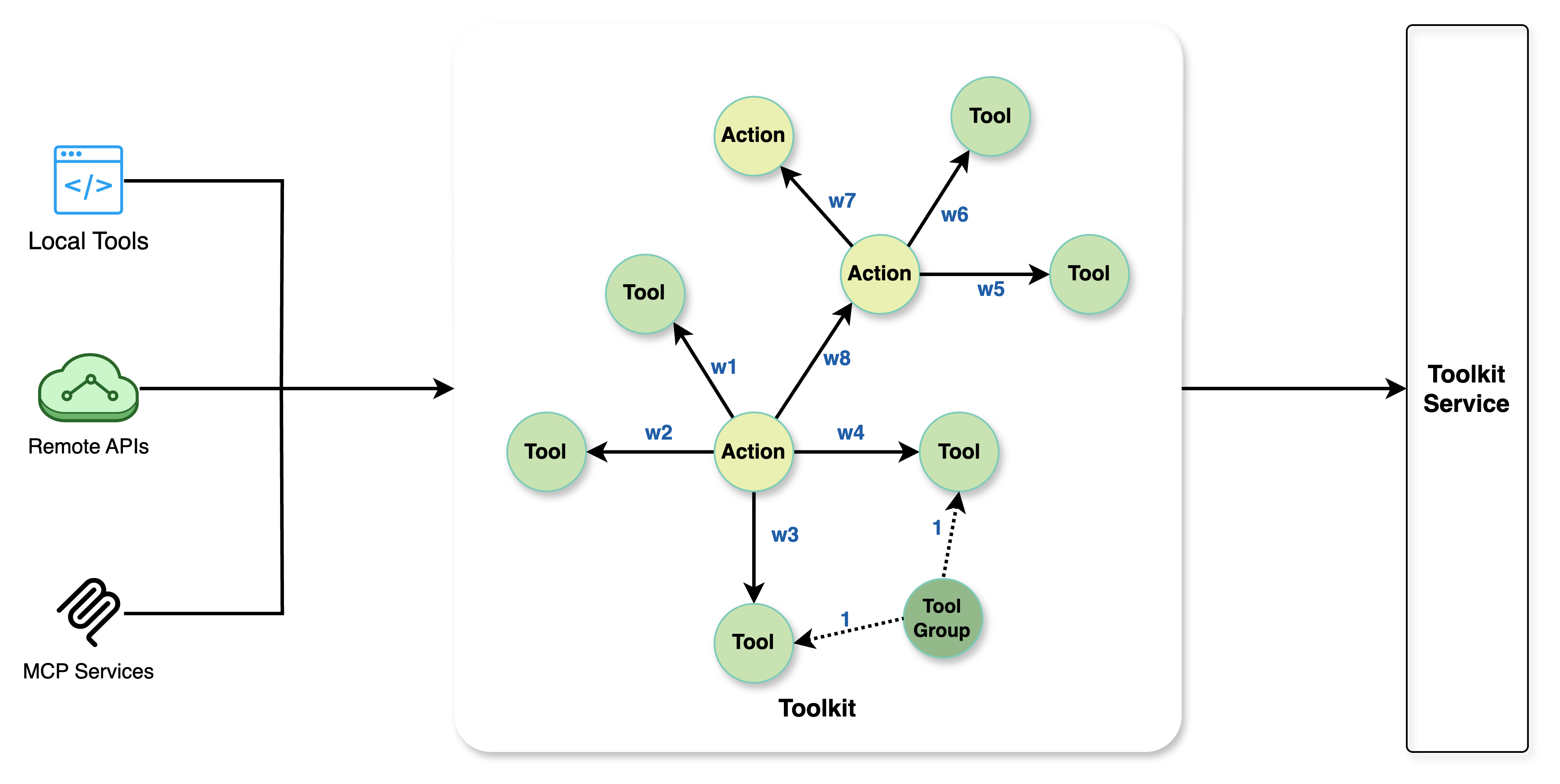
工具库(Toolkit)模块是 Chat2Graph 的核心组成部分之一,其主要职责是为框架中的 Operator 推荐具体执行指示以及与外部世界交互的能力。它通过精心管理一个由“行动” (Action)、“工具” (Tool) 及“工具组” (ToolGroup) 构成的有向图——即 Toolkit 来实现这一目标。这个图不仅精确地定义了不同工具之间的调用关系,还明确了它们之间潜在的执行顺序,从而拓宽了 Operator 执行的能力边界。
该模块致力于解决工具调用的问题。首先,它实现了高级的工具管理机制:通过一个包含 Action、Tool 和 ToolGroup 的有向图,清晰地描述了工具调用间的依赖和转换关系,这远胜于传统的简单工具列表。基于这种图结构,系统能够更智能地向大型语言模型 (LLM) 推荐当前情境下可调用的工具及相关的“行动”,显著提高了推荐的准确率。同时,图的精确性有效约束了 LLM 选择工具的范围,从而降低了工具调用的不确定性和潜在的错误率。对于开发者而言,Toolkit 提供了统一的工具注册和推荐机制,使得 Tool 和 Action 可以方便地被复用,简化了开发流程。此外,该模块已经支持 MCP (模型上下文协议) ,未来将会支持通过强化学习增强 ToolkitService 推荐能力的离线学习功能。
Toolkit 模块的主要功能点包括:
- 支持工具 (
Tool) 和工具组 (ToolGroup) 的定义与注册,并兼容 LLM 的函数调用模式。 - 允许定义行动 (
Action),每个行动可以包含一组可用工具以及指向后续可能行动的链接。 - 核心的工具集 (
Toolkit) 组件负责工具库的整体构建和管理。 - 这些功能通过
ToolkitService进行服务化管理,并通过ToolkitWrapper提供便捷的 SDK 接口供上层应用调用。
Toolkit 被整个系统所共享,因此,其中的行为和工具都是可复用的。
2. 设计
2.1. 工具图谱设计
Toolkit 使用有向图图谱结构组织工具和行动。图中的节点主要是 Action,每个 Action 节点可以关联一组 Tool,代表在该 Action 下可执行的操作。同时,Action 通过其 next_action_ids 属性指向后续可能的 Action 节点。在 Toolkit 的这张图中,Action 之间通过带权重的 Next 边连接,表明了行为序列的顺序关系及其关联强度;而 Action 与其关联的 Tool 之间则通过带权重的 Call 边连接,表明了行为调用工具的逻辑关系及可能性。这种图结构清晰地定义了任务执行过程中的不同阶段(即 Action)、每个阶段可用的工具(即 Tool),以及它们之间潜在的转换路径,从而为任务执行提供了明确的流程引导。ToolGroup 则作为 Tool 的逻辑集合,与其包涵的每个 Tool 之间通过 Group_Has_Tool 边(权重固定为 1)连接,表示它们之间的归属关系,便于管理。
-
Tool代表一个独立的、可执行的工具。每个工具包含其名称、功能描述、输入参数的 JSON Schema 定义以及具体的执行逻辑。在Toolkit中,Tool是被Action调用的基本执行单元。Tool可以被Reasoner调用。此外,它还支持通过app.core.reasoner.injection_mapping定义的模块服务(例如GraphDbService)作为工具调用时的参数,自动注入到目标工具中(即,你不需要在 docstring 中声明服务模块参数。因为Reasoner调用工具时会自动检测和导入对应模块),从而增强了工具的灵活性和功能。 -
Action代表 LLM 在执行任务过程中的一个状态或决策点,是Toolkit图中的核心节点。Action的描述信息有助于 LLM 理解其代表的意图和功能。一个Action可以关联一个或多个Tool,表明执行该Action时可能需要调用这些工具。 -
ToolGroup是Tool的一个逻辑集合,通常代表一个内/外部服务(比如 MCP server)或一组功能相关的工具。这使得批量注册和管理工具变得更加便捷。 -
Toolkit负责组织和管理由多个Action、Tool和ToolGroup节点构成的有向图。它不仅是工具的简单集合,更重要的是,它清晰地表达了工具间的调用逻辑、组织关系和任务流程。 -
ToolkitService负责管理Toolkit实例,并根据当前上下文向 LLM 推荐合适的Action和Tool。
这种基于图的 Toolkit 机制带来了显著优势。首先,它实现了上下文感知的工具推荐:系统能够根据当前所处的 Action 节点在图中的位置,更精确地向 LLM 推荐当前 Action 下可用的 Tool 或可能的下一个 Action,这远比提供一个扁平、无上下文关联的工具列表更为智能和高效。其次,通过预定义的图结构,Toolkit 有效地缩小了 LLM 在选择工具或决定下一步行动时的搜索空间,显著降低了选择的随意性和不确定性,从而提升了工具调用的准确性和任务执行的整体效率。最后,这种结构化的方法使得复杂流程的建模更为自然和直观,能够清晰地表达包含多个步骤、存在依赖关系或特定条件的复杂工具调用流程。
2.2. 工具库实现
-
初始配置: 系统通过YAML配置预设的
Action、Tool、ToolGroup集合,以及Operator绑定的Action集合。其中图数据库的操作工具已作为内置能力集成到系统内部,只需要通过 图数据库 服务注册即可。另外,动态工具注册能力还在建设当中。 -
工具推荐: 基于
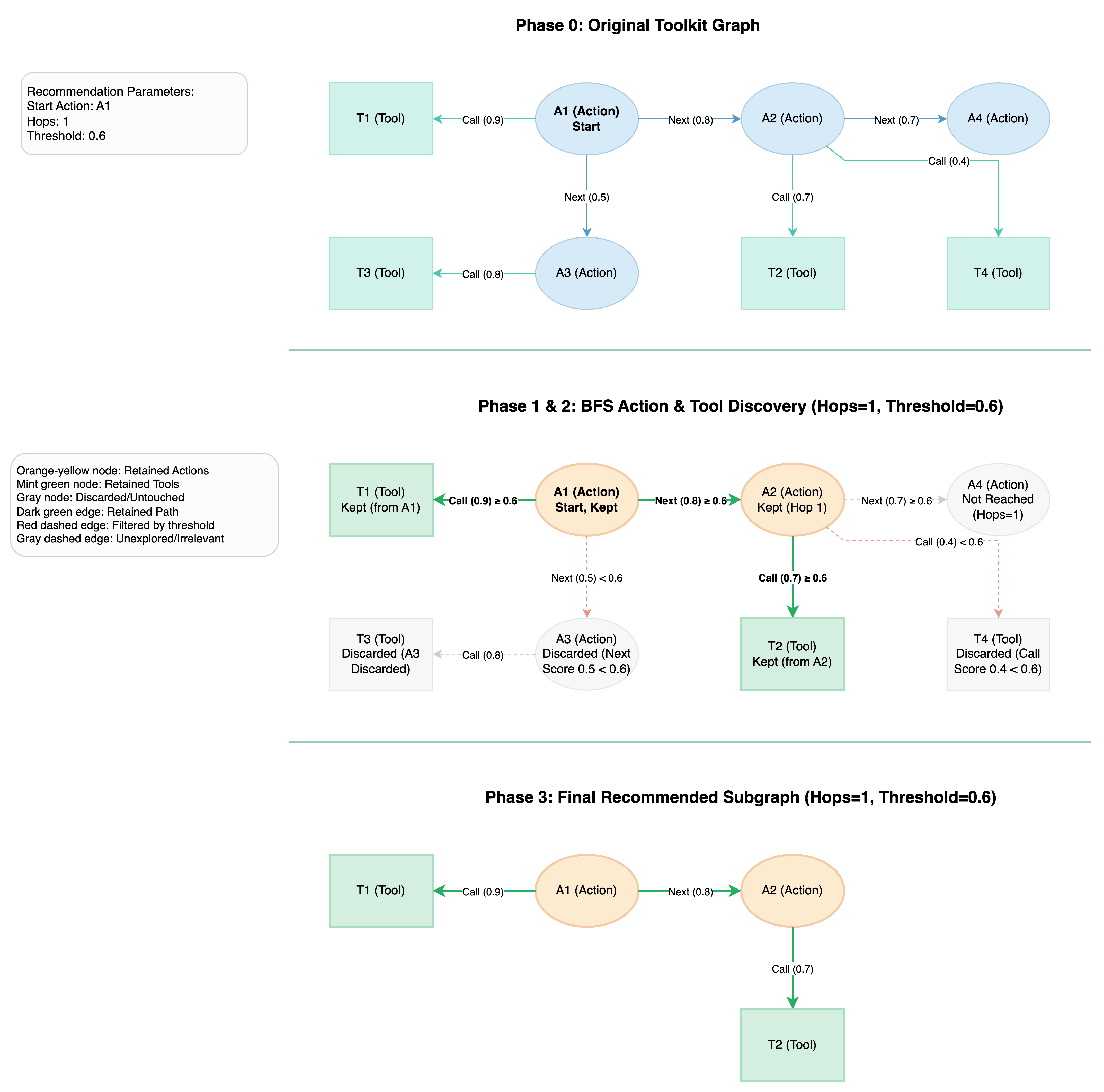
Operator绑定的Action集合,ToolkitService会在 Toolkit 中进行图上探索。它会查找与当前Action相关联的其他Action和可用的Tool,并将它们作为推荐项提供出来。推荐的范围(例如,探索的深度或关联强度)可以通过配置阈值和图遍历的跳数来控制。
- 工具调用:
Reasoner(通常结合 LLM 的决策能力) 从ToolkitService推荐的Action和Tool列表中选择最合适的Tool。选定后,Reasoner会执行该Tool并获取其执行结果,用于后续的任务处理。

- 工具库优化: 工具库的能力还在持续优化中,比如支持工具集的一键注册,以及基于强化学习思路的工具图谱优化等。

2.3. API
2.3.1. 工具库 API
Toolkit 类继承自 Graph,专门用于构建和管理由 Action、Tool 和 ToolGroup 构成的有向图。
| 方法签名 | 描述 |
|---|---|
add_vertex(self, id, **properties) -> None | 向图中添加一个顶点(Action、Tool 或 ToolGroup)。properties 字典中应包含一个键为 data 的项,其值为相应的对象。根据对象的类型,将其存储到对应的内部字典中。 |
vertices_data(self) -> List[Tuple[str, Dict[str, Union[Action, Tool, ToolGroup]]]] | 获取工具库中所有顶点及其关联数据。返回一个元组列表,每个元组包含顶点 ID 和一个包含其数据的字典。 |
update(self, other: Graph) -> None | 使用另一个 Toolkit 实例 (other) 中的顶点和边来更新当前图。如果顶点或边已存在,则不重复添加;如果 other 中包含新的 Action、Tool、ToolGroup 或边及其分数,则将其添加到当前图中。 |
subgraph(self, ids: List[str]) -> "Toolkit" | 根据提供的顶点 ID 列表 (ids) 创建并返回一个新的 Toolkit 实例,该实例是原图的一个子图,包含指定的顶点及其之间的边和关联数据。 |
remove_vertex(self, id: str) -> None | 从图中移除一个顶点。此操作会触发单向级联删除:1. 删除 Action 会移除只与此 Action 关联的 Tool。2. 删除 ToolGroup 会移除其包含的所有 Tool。3. 删除 Tool 会反向删除其父级 ToolGroup,当 ToolGroup 只和一个 Tool 连接时。 |
get_action(self, id: str) -> Optional[Action] | 根据顶点 ID 获取关联的 Action 对象。如果 ID 不存在或不对应 Action,则返回 None。 |
get_tool(self, id: str) -> Optional[Tool] | 根据顶点 ID 获取关联的 Tool 对象。如果 ID 不存在或不对应 Tool,则返回 None。 |
get_tool_group(self, id: str) -> Optional[ToolGroup] | 根据顶点 ID 获取关联的 ToolGroup 对象。如果 ID 不存在或不对应 ToolGroup,则返回 None。 |
get_score(self, u: str, v: str) -> float | 获取连接顶点 u 和 v 的边的分数。如果边不存在,默认返回 1.0。 |
set_score(self, u: str, v: str, score: float) -> None | 设置连接顶点 u 和 v 的边的分数。 |
2.3.2. 工具库服务 API
ToolkitService 是一个单例服务,负责管理 Toolkit 实例,并提供工具和行为的注册、推荐及可视化功能。
| 方法签名 | 描述 |
|---|---|
get_toolkit(self) -> Toolkit | 返回当前服务管理的 Toolkit 实例。 |
add_tool(self, tool: Tool, connected_actions: List[Tuple[Action, float]]) | 向工具库中添加一个 Tool。tool 是要添加的工具对象,connected_actions 是一个列表,包含调用此工具的 Action 对象及其对应的分数(表示关联强度)。如果 Action 不存在于图中,会打印警告。如果工具没有任何 Action 连接,也会打印警告并移除该工具。 |
add_tool_group(self, tool_group: ToolGroup, connected_actions: List[Tuple[Action, float]]) -> None | 向工具库中添加一个 ToolGroup 及其包含的所有工具。tool_group 是工具组对象,connected_actions 是调用这些工具的 Action 列表及分数。该方法会先注册 ToolGroup 节点,然后将其下的所有 Tool 添加到工具库中,并建立 ToolGroup->Tool 和 Action->Tool 的连接。 |
add_action(self, action: Action, next_actions: List[Tuple[Action, float]], prev_actions: List[Tuple[Action, float]]) -> None | 向工具库中添加一个 Action。action 是要添加的行为对象,next_actions 和 prev_actions 分别是此行为的后继和前驱 Action 列表及其关联分数。 |
get_action(self, action_id: str) -> Action | 根据 action_id 从工具库中获取 Action 对象。如果未找到,则抛出 ValueError。 |
remove_tool(self, tool_id: str) | 根据 tool_id 从工具库中移除一个 Tool。 |
remove_action(self, action_id: str) | 根据 action_id 从工具库中移除一个 Action。 |
recommend_subgraph(self, actions: List[Action], threshold: float = 0.5, hops: int = 0) -> Toolkit | 推荐引擎核心方法。基于输入的 Action 列表,通过带权重的广度优先搜索(BFS)在指定的 hops 范围内查找相关的 Action,然后关联这些 Action 调用的 Tool。所有关联关系的分数需大于等于 threshold。返回一个包含这些相关 Action 和 Tool 的子图 (Toolkit)。 |
recommend_tools_actions(self, actions: List[Action], threshold: float = 0.5, hops: int = 0) -> Tuple[List[Tool], List[Action]] | 基于 recommend_subgraph 的结果,将推荐的子图中的 Tool 和 Action 分别提取出来,返回一个包含 Tool 列表和 Action 列表的元组。 |
visualize(self, graph: Toolkit, title: str, show=False) | 将给定的 Toolkit 图 (graph) 可视化。Action、Tool 和 ToolGroup 节点会以不同颜色和形状展示,边也会根据类型有所区分,并显示关联分数。title 为图表标题,show决定是否立即显示图像。返回 matplotlib.pyplot.Figure 对象。 |
3. 示例
Toolkit的Action、Tool和ToolGroup注册:test/example/run_toolkit.pyToolkitService向Operator推荐Action和Tool:test/example/run_operator.py- 接入浏览器使用 MCP:
test/example/mcp/run_playwright_mcp.py - 接入本地文件操作 MCP:
test/example/mcp/run_file_system_mcp.py