Leader
1. 介绍
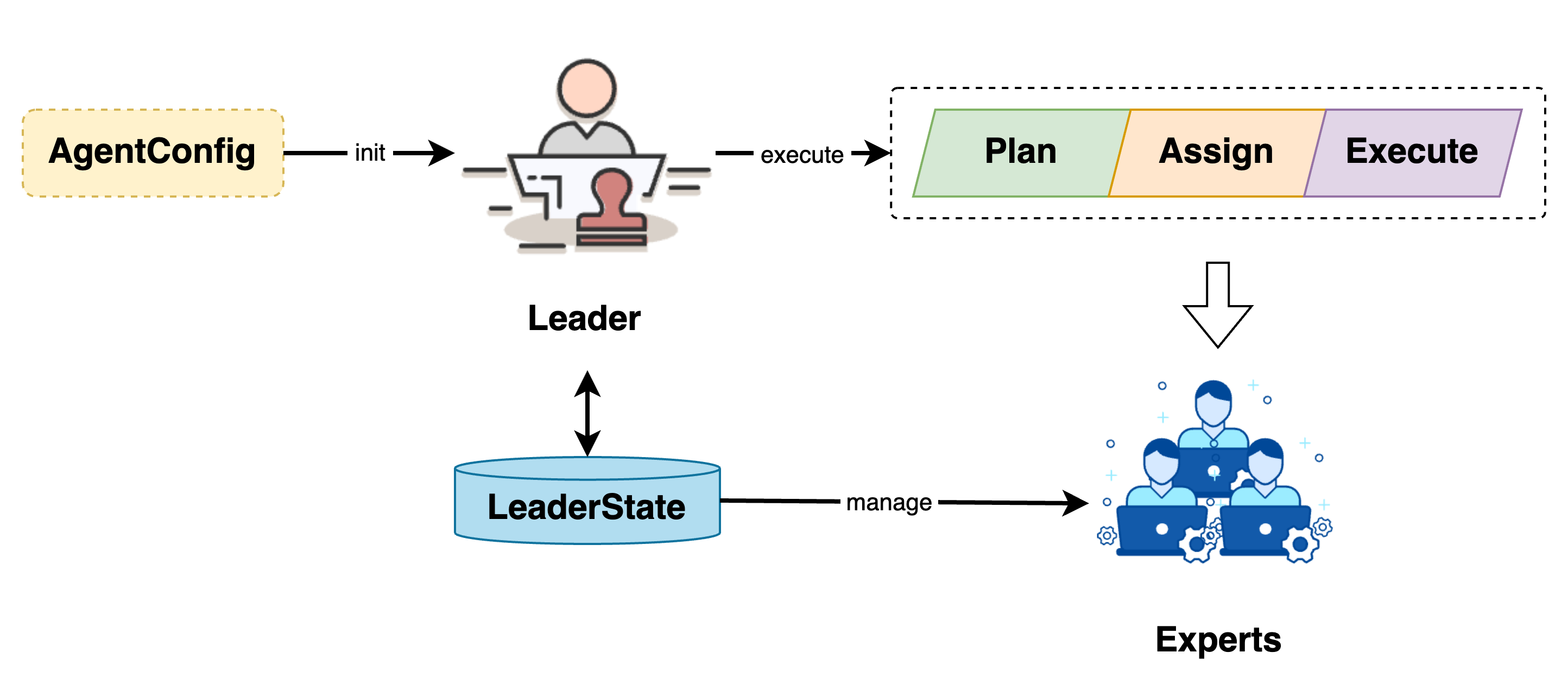
作为 Chat2Graph 系统的核心组件与任务主入口,Leader 负责任务的规划、分配和执行,以及 Expert 生命周期的管理。
2. 设计
Leader 通过 AgentConfig 初始化,并通过 LeaderState 管理 Expert 生命周期。任务提交给 Leader 后,会经历任务规划、任务分配与任务执行三个阶段。
2.1. 规划
智能体规划器主要负责智能体任务的规划与拆解,不同于传统智能体系统的线性规划器,Chat2Graph 采用基于图结构的规划器,在将智能体任务拆分为可执行单元的同时,保留了子任务间的依赖关系,以更好地应对任务执行的不确定性。
规划器的核心在于一个精心设计的 Prompt,即 JOB_DECOMPOSITION_PROMPT,它指导 Leader 将一个主任务(Given Task)分解为一系列可执行的子任务。Leader 将首先结合对话历史与系统当前状态,来主动推断用户的真实意图和期望的下一个逻辑步骤。基于此推断,Leader 需确定完成该步骤所需的目标专家(Expert)及其行动。任务分解是其唯一输出,即使在信息不完整的情况下(例如用户提及忘记上传文件),也必须为相关专家制定子任务,并在子任务上下文中注明潜在问题。分解时,LLM 应力求最少的必要逻辑子任务,同时确保子任务的分配仅限于先前确定的专家。每个子任务需包含所有必要信息,保持角色中立,并严格限制在原始任务范围内。对于简单或仅需单一专家的任务,则应生成单个子任务。
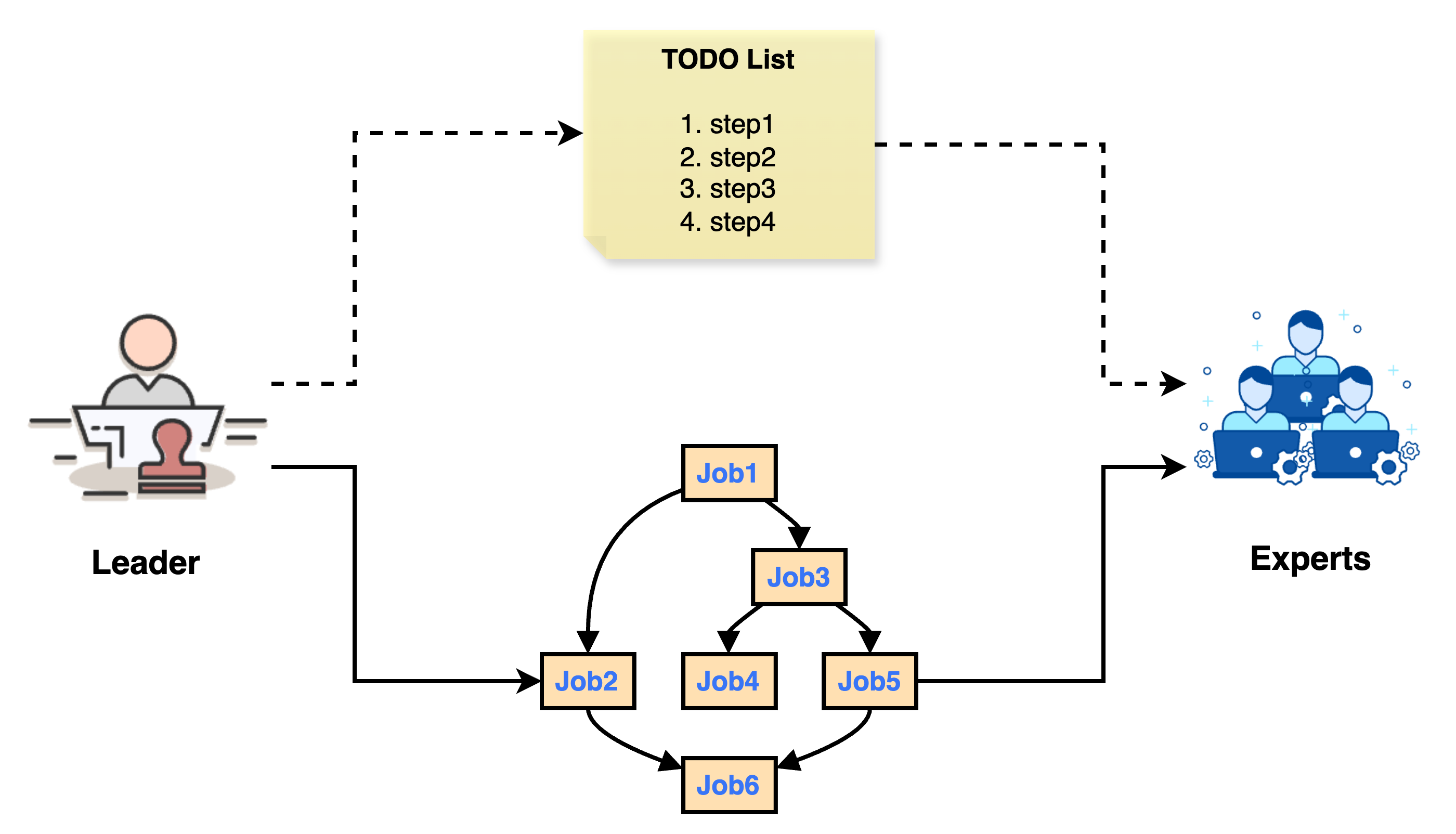
Leader 在收到原始任务(OriginalJob)后,若无预设 Expert,则将其分解为一张子任务图(JobGraph)。这张图是一个有向无环图(DAG),其中节点代表子任务(SubJob),边代表子任务间的依赖关系。
如果原始任务已经预设了
Expert,那么Leader将会跳过任务拆解的过程,然后直接将该任务分配给预设的Expert,同时JobGraph将只有一个节点,即原始任务。
Chat2Graph 明确定义子任务包含的字段,参考 JOB_DECOMPOSITION_OUTPUT_SCHEMA,并使用 JobGraph 表达子任务之间的依赖关系。
| 字段 | 描述 |
|---|---|
goal | 目标,必须精确反映用户最新请求。 |
context | 上下文,需包含对话历史摘要、用户反馈以及这些上下文如何塑造当前任务。 |
completion_criteria | 完成标准,需明确且可衡量,直接回应对话历史中突显的需求或修正。 |
dependencies | 依赖关系,仅在生成多个子任务时定义,用于确定子任务之间的依赖关系,形成一张 JobGraph,由 JobService 负责管理。 |
assigned_expert | 分配的专家名,Leader 指定该子任务由哪位专家完成。 |
thinking | 思考过程,要求 LLM 以第一人称解释生成该子任务的思考过程,包括其必要性、初步方法及关键考量(冗余字段)。 |
2.2. 分配
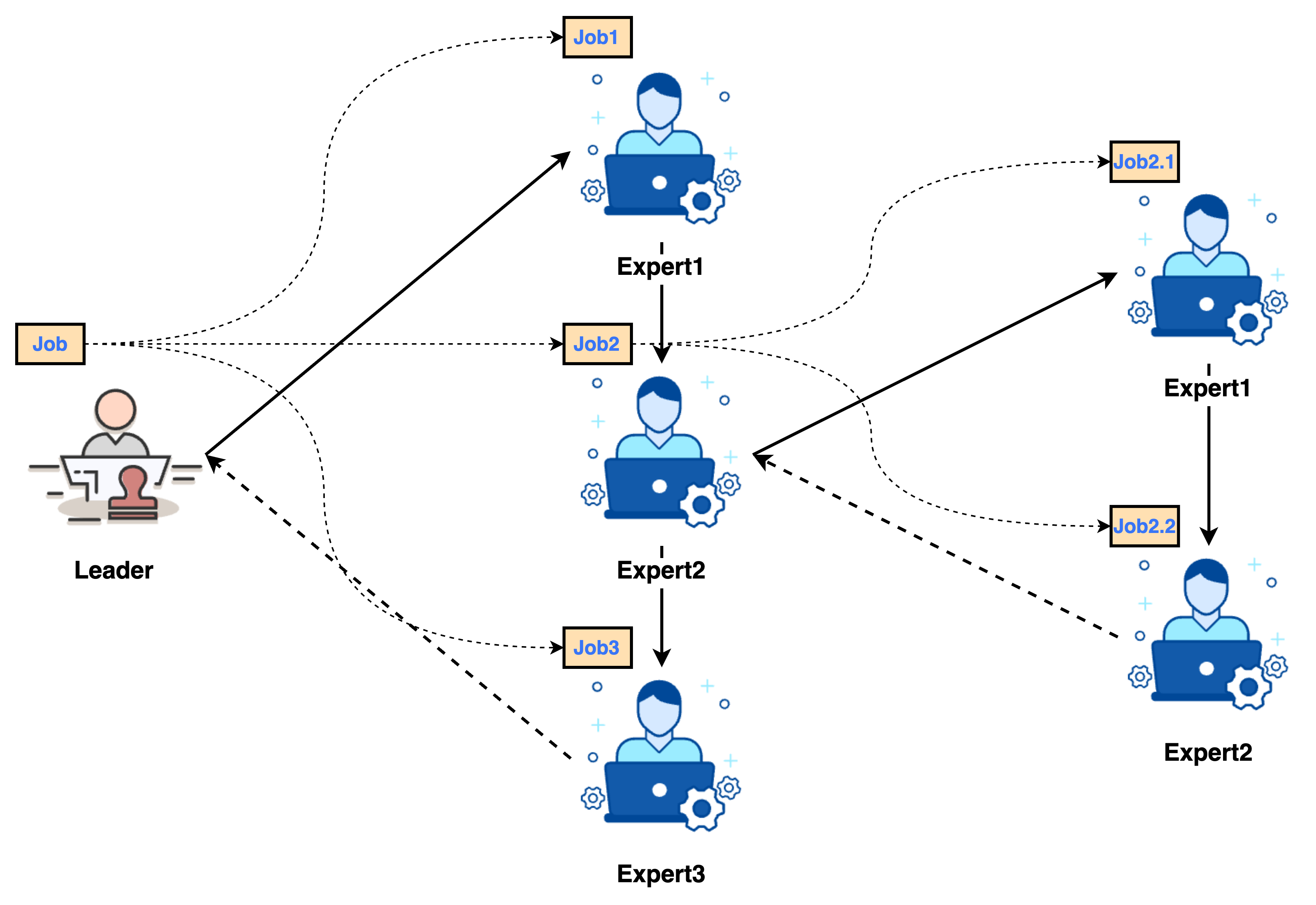
任务分配阶段,Leader 根据 JobGraph 组织的子任务关系,分配对应的专家执行。
- 并行任务调度:
Leader使用线程池并行调度无前置依赖或所有前置依赖已完成的子任务。它会持续监控任务状态,一旦任何某个子任务的所有前置任务完成,该子任务即被提交执行。 - 分配 Expert 处理:每个子任务
SubJob被分派给指定的Expert。Expert执行其内部工作流(Workflow)来处理子任务。
2.3. 执行
我们借助状态机来解释 Job/SubJob 与 Agent 之间的传递、转换机制。
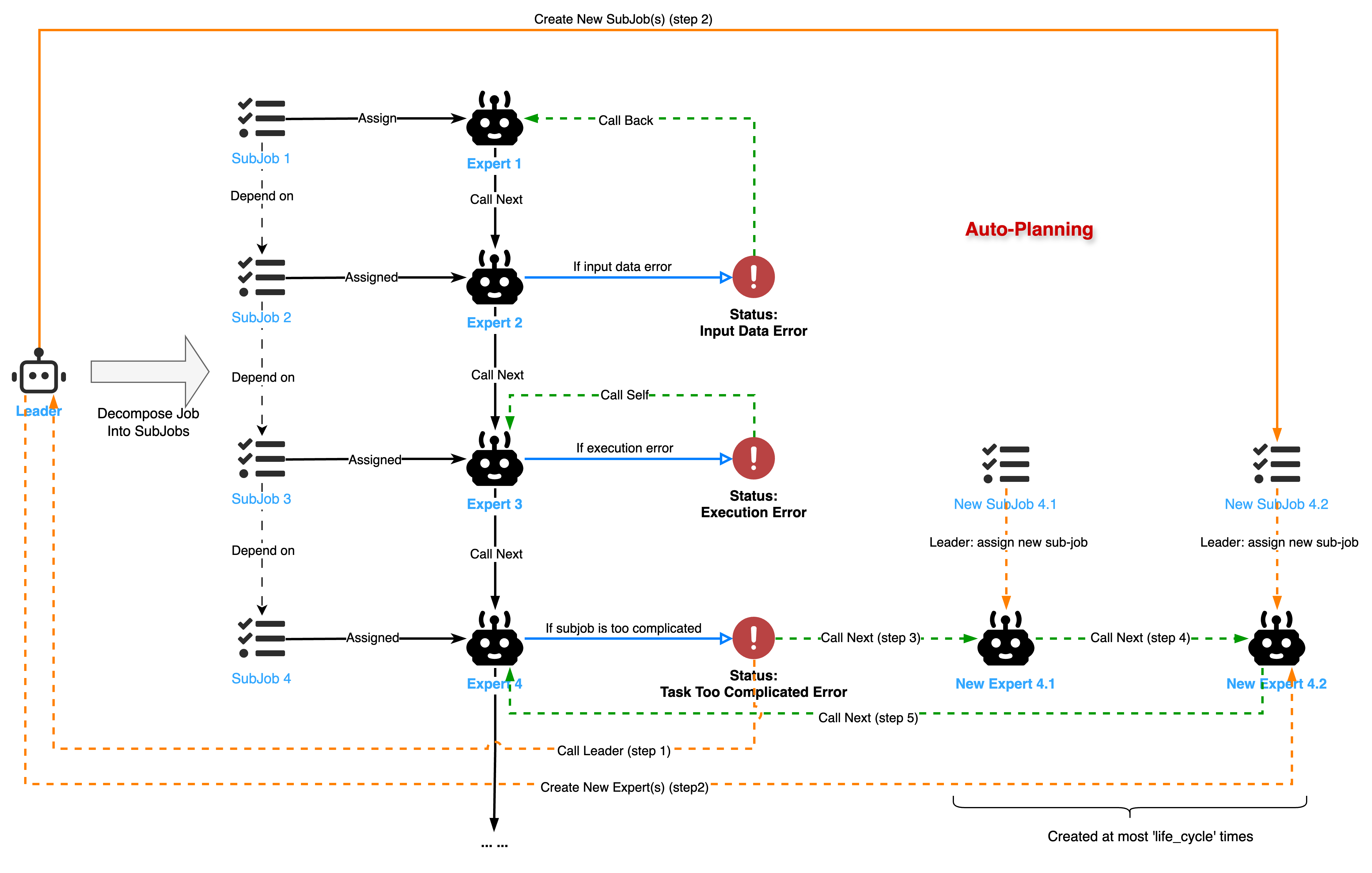
当 Expert 执行完 SubJob 后,会返回一个 WorkflowMessage,其中包含 workflow_status,该状态决定了后续流程:
SUCCESS:子任务成功完成。Leader会记录结果,并更新JobGraph的状态,进而可能触发后续依赖任务的执行。EXECUTION_ERROR:Expert执行过程中发生内部错误(如 API 请求失败)。Leader会根据重试策略(retry_count)决定是否重试该Expert的执行。若达到最大重试次数,则该子任务及整个JobGraph可能会被标记为FAILED。INPUT_DATA_ERROR:Expert判断输入数据有问题,无法继续执行。Leader接收到此状态后,会将此子任务及其前置依赖任务重新加入待处理队列,并可能附带lesson(经验教训)给前置任务的Expert,以便修正输出。JOB_TOO_COMPLICATED_ERROR:Expert认为当前子任务过于复杂,无法独立完成。Leader会将此子任务视为一个新的“原始任务”,再次调用任务分解逻辑,将其进一步细化为更小的子任务,并更新到JobGraph中。为防止无限分解,子任务设有生命周期(life_cycle)计数 —— 每一次任务分解,生命周期将会减少 1,直到 0 为止。
当 JobGraph 中的所有子任务都成功完成,整个原始任务即告完成。若任何关键子任务最终失败或整个图的执行被中断(例如,Leader 调用 fail_job_graph 或 stop_job_graph),则原始任务会相应地标记为 FAILED 或 STOPPED。
这种状态机确保了任务能够根据依赖关系进行并行处理,同时具备对执行过程中各类情况的适应性和纠错能力。此外,JobGraph 还支持中断(stop_job_graph)和恢复(recover_original_job)操作,使得在 planner 调度下的多智能体协作更加灵活和可控。
3. API
Leader Agent 提供的核心 API 如下。
| 方法签名 | 描述 |
|---|---|
execute(self, agent_message: AgentMessage, retry_count: int = 0) -> JobGraph | 核心的任务分解方法。接收一个包含待处理任务(可能是原始任务或需要进一步分解的子任务)的 AgentMessage。如果任务已预设专家,则直接创建单节点 JobGraph;否则,调用其内部工作流 (Workflow) 和推理器 (Reasoner) 将任务分解为一张子任务图 (JobGraph)。此方法包含对分解结果的校验和基于 lesson 的重试逻辑。 |
execute_original_job(self, original_job: Job) -> None | 接收一个原始任务 (OriginalJob)。首先将其状态更新为 RUNNING,然后调用 execute 方法将其分解为子任务图,并将此图存入 JobService。最后,调用 execute_job_graph 来执行这张图。 |
execute_job_graph(self, original_job_id: str) -> None | 执行指定 original_job_id 对应的子任务图 (JobGraph)。它使用 ThreadPoolExecutor 并行调度无依赖或所有前置依赖已完成的子任务。此方法处理子任务执行后的不同 WorkflowStatus(如 SUCCESS, INPUT_DATA_ERROR, JOB_TOO_COMPLICATED_ERROR),并据此更新任务图状态或重新调度任务。 |
stop_job_graph(self, job_id: str, error_info: str) -> None | 停止与给定 job_id (可以是原始任务 ID 或子任务 ID) 相关的整个任务图。将原始任务及所有未完成(且无最终结果)的子任务状态标记为 STOPPED,并记录错误信息作为系统消息。正在运行的任务不会被强制中断,但其完成后状态也会被相应更新。 |
fail_job_graph(self, job_id: str, error_info: str) -> None | 标记指定的 job_id 对应的任务结果为 FAILED(如果尚无最终结果),然后调用 stop_job_graph 来停止相关的整个任务图,并将其他未完成任务标记为 STOPPED。 |
recover_original_job(self, original_job_id: str) -> None | 恢复一个先前被标记为 STOPPED 的原始任务。如果该原始任务没有子任务(即未被分解),则将其状态重置为 CREATED 并重新调用 execute_original_job。如果已有子任务,则将原始任务状态设为 RUNNING,并将所有状态为 STOPPED 的子任务重置为 CREATED,然后重新调用 execute_job_graph。 |
state(self) -> LeaderState (property) | 获取 Leader 的状态对象 (LeaderState)。该状态对象管理 Leader 可用的 Expert 列表等运行时状态信息。 |
4. 示例
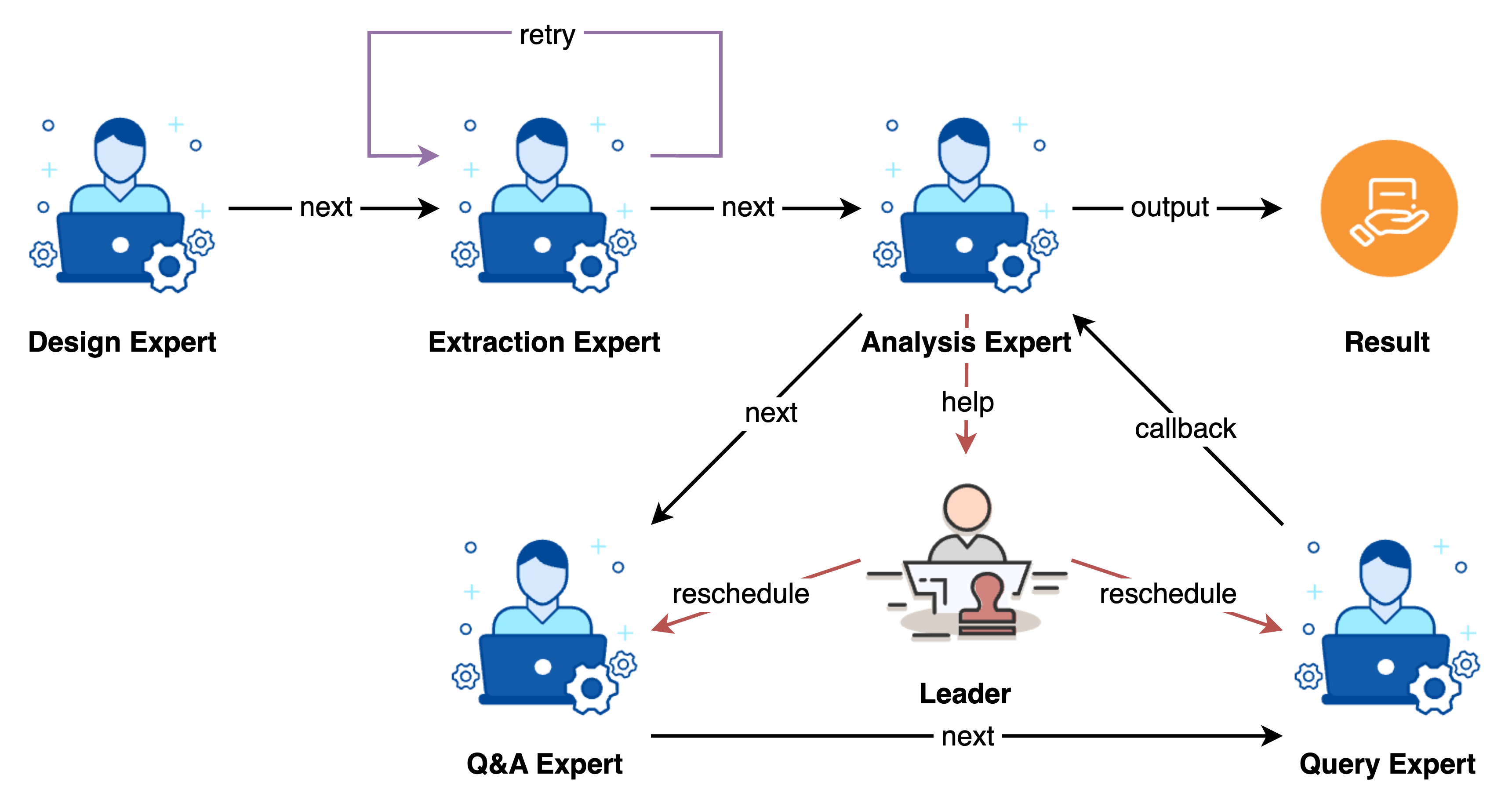
以下展示了一个典型的图数据任务的处理场景:
以下是一些代码示例:
- Leader 执行字符串处理任务:
test/example/agent/run_leader_v1.py - Leader 执行自然语言处理任务:
test/example/agent/run_leader_v2.py